











































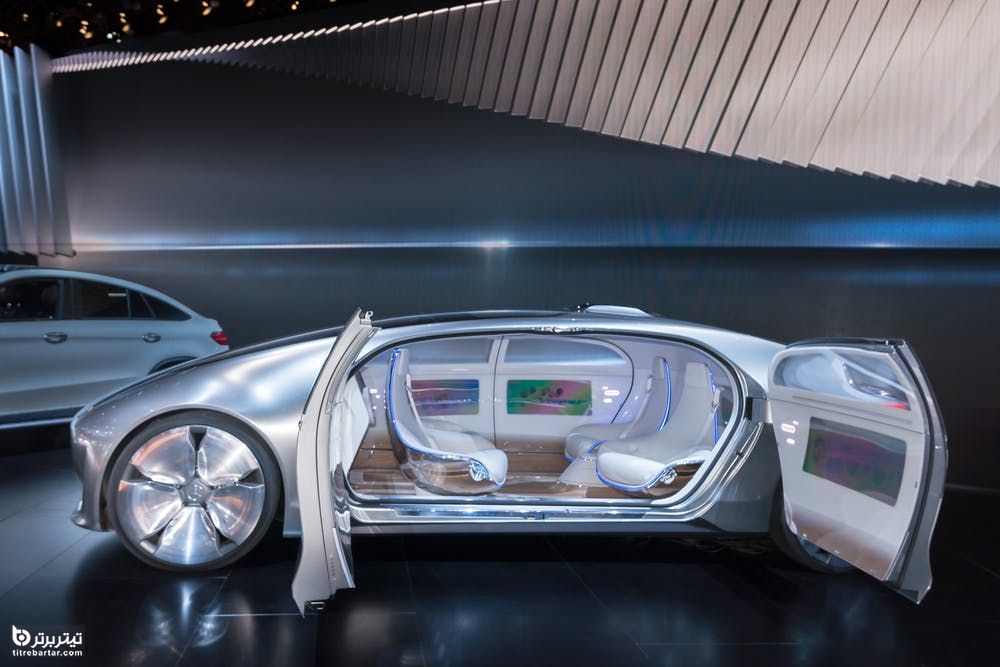
تیتربرتر: با پیشرفت علم و تکنولوژی ، در آینده نزدیک شاهد تردد خودرو های خودران یا بدون راننده خواهیم بود اما یکی از مشکلات حقوقی و انسانی موجود در این تکنولوژی تصمیم بر سر اهمیت جان سرنشین یا فرد پیاده است.
مشکل تصمیم گیری در ماشین های خودران

گاهی لازم است سفری هر چند کوتاه به آینده داشت. باید از همین حالا تأثیر خودران ها بر زندگی مردم را به طور دقیق مورد بررسی قرار داد و جلوی برخی از معضلات و چالش های پیش رو را گرفت. برخی از این مسائل همین حالا هم راه حل ندارند و گریبان جوامع را گرفته اند. یکی از این چالش ها تصمیم گیری در زمانی بسیار کوتاه است که در آینده قرار است به تراشه ها و پردازشگرهای خودروها تفویض شود و باید از همین حالا در نوشتن الگوریتم های این تراشه ها به آن فکر شود. برای مثال زمانی که در کسری از ثانیه باید تصمیم گرفت که جان فرد پیاده مهمتر است یا حفظ جان سرنشینان، باید از قبل به این دو شاخه شدن تصمیم در الگوریتم های نرم افزار فکر شده باشد. برای همین برنامه نویس باید به نرم افزار این دستور را بدهد که در چنین مواردی تا چه حد اجازه دارد جان سرنشین ها را به مخاطره بیندازد تا جان یک فرد پیاده نجات پیدا کند.
البته این سؤال تازه ای نیست ولی به طور دائم پاسخ به آن زوایای جدیدی پیدا می کند. برای مثال سریال تلویزیونی Upload که فصل اول آن در حال پخش است، این سؤال را مطرح می کند که اگر تمام اختیار یا انتخاب به خود خودرو واگذار نشود چه وضعیتی حاصل خواهد شد؟ فرض کنید که نرم افزارها به قدری پیشرفته شده باشند که بتوان به آن ها این اختیار را داد که خودشان سبک و سنگین کنند و مسائل اخلاقی را هم با ضریبی خاص در تصمیم گیری دخالت دهند؟
در یکی از قسمت های سریال آپلود، در آینده نزدیک فضایی به تصویر کشیده شده که انسان ها بعد از مرگشان به صورت دیجیتالی به حیات ادامه می دهند. در یکی از صحنه های قسمت اول این سریال شخصیت اصلی داستان برای نجات جان نامزد خود، خودرانی که در آن سوار می شوند را از وضعیت «ترجیح سرنشین» به حالت «ترجیح پیاده» قرار می دهد، در حالی که نامزد وی که فردی با ملاحظه است آن را در وضعیت ترجیح پیاده قرار داده بود. شاید از این جای ماجرا به توضیح بیشتری نیاز نداشته باشد چون انتخاب واژه ها در گزینه های پیش رو آنها کاملا روشن است.
چنین تصمیمی بدون تردید نیاز به مداخله ی ارزش های اخلاقی دارد. مسائل حقوقی آن هنوز به طور کامل تبیین نشده است و باید از همین حالا به این فکر کرد که بعد از حادثه چگونه می توان با انصاف و عدالت تشخیص داد که مسئولیت آن رویداد یا تصادف با چه کسی بوده است. باید این را در نظر داشت که به قدری احتمالات زیاد هستند که تعیین و لحاظ کردن آن در الگوریتم نرم افزارها و هوش مصنوعی فعلاً امکان پذیر نیست.
خوب در چنین مواردی حق با کیست. در این بخش از سریال فرد صاحب خودران با ملاحظه است و نجات جان پیاده را به حفظ جان خود ترجیح داده اما این تصمیم مشابه تصمیم نامزد او نیست. و بعد از حادثه هم به راحتی نمی توان مشخص کرد که تصمیم درست کدام بوده است.
برای مثال فرض را بر این بگذارید که در یک روز بارانی چند پیاده از سر حواس اضطرار یا عدم توجه کافی در یک لحظه تغییر چراغ قرمز به سبز، تعجیل کرده و وارد خط عبور پیاده شوند، اگر خودران در وضعیت «ترجیح پیاده» باشد، بدون هیچ تردیدی تصمیم می گیرد و خودرو را از مسیر خارج کرده و جان سرنشین را به خطر انداخته تا با پیاده ها تصادف نکند. حالا اگر به معنی واقعی کلمه سرنشین در اثر تصادف جان خود را از دست بدهد در این مورد خاص تقصیر با چه کسی است؟ عدالت چگونه اجرا می شود؟
حالا همین مثال را در نظر بگیرید، با این تفاوت که خودران در وضعیت ترجیح سرنشین است. باز هم خودران بدون تردید جان سرنشین را ترجیح خواهد داد و جان چند پیاده به خطر می افتد.
حالا در چنین مواردی هنوز قوانین هم به درستی پاسخگو نیستند چون پیش بینی همه این موارد در آنها لحاظ نشده است. در روزگاری که با شیوع ویروس کرونا نمی توان همه مردم را وادار به پوشیدن ماسک کرد چگونه می توان مشخص کرد مسئولیت تصادف ها و رویدادها در دوران خودران ها با چه کسی است.
تاریخچه ماشین های خودران
تحقیقات بر روی سیستمهای خودران یا ADS، دست کم از سال 1920 شروع شد و آزمایشها بر آن از 1950 آغاز گردید. اولین خودروی نیمه خودران در سال 1977 توسط آزمایشگاه مهندسی مکانیک تسوکوبا ژاپن طراحی شد که به خیابانهای خط کشی شده نیازمند بود تا از طریق دو دوربین روی چرخها و یک کامپیوتر آنالوگ این خط کشیها را تفسیر کند. سرعت این خودرو تا 30 کیلومتر بر ساعت میرسید.
اولین خودروهای خودران واقعی ابتدا توسط دانشگاه کارنگی ملون آمریکا در سال 1980 و پس از آن با سرمایه گذاری دپارتمان دفاع آمریکا بر روی پروژهی ALV در سال 1990 و سپس توسط شرکت مرسدس بنز و پروژهی اریکا دانشگاه بوندسوئر مونیخ آلمان در سال 1987، پا به عرصهی ظهور گذاشتند. پروژهی ALV در سال 1985 توانست سرعت این خودروها را به 31 کیلومتر بر ساعت در خیابانهای دو بانده برساند و در سال 1986 قابلیت تشخیص موانع و عدم برخورد به آنها را به این خودروها اضافه کرد. در سال 1987 نیز قابلیت رانندگی خارج از جاده، در شرایط شب و روز را برای این خودروها طراحی کرد.
آمریکا در سال 1991 مبلغ 650 میلیون دلار برای تحقیق بر روی سیستم بزرگراههای اتوماتیک اختصاص داد تا رانندگی بدون راننده از طریق ارتباط تکنولوژی قرار گرفته در چرخهای ماشینهای خودران با تکنولوژی قرار گرفته در زیرساخت بزرگراه، تحقق یابد. در سال 1997 این پروژه به نتایج موفقیت آمیزی دست یافت اما سرمایهگذاریهای وسیعتری بر روی آن صورت نگرفت.
در سال 2017، آئودی اظهار کرد که جدیدترین خودروی این شرکت یعنی A8، با استفاده از سیستم هوش مصنوعی آئودی، میتواند تا سرعت 60 کیلومتر بر ساعت روی حالت خودران قرار گیرد و راننده مجبور نخواهد بود که مدام غربیلک فرمان خودروی خود را محکم بگیرد. بنا بر ادعای شرکت آئودی، A8 اولین خودروی تولید شده ای بود که به سطح سه تکنولوژی خودران دست یافت و آئودی اولین کارخانه ای شد که در سیستم خود علاوه بر دوربین و سنسورهای اولتراسونیک، از اسکنرهای لیزری نیز استفاده میکند.
مطالب مرتبط: آینده صنعت حمل و نقل شهری در دستان روبوتاکسی
خودرو های خودران چگونه کار می کنند؟

پیشرفت عظیم مرزهای تکنولوژی در سالهای اخیر بالاخره منجر به ساخت ماشینهای خودران واقعی شد. امروزه سه تکنولوژی، امکان داشتن خودروهای خودران را برای ما فراهم کردهاند که عبارتند از:
بهره بری از سنسورها
امروزه از سنسورهای متنوعی برای ساخت خودروهای خودران استفاده میشود. سنسورهایی برای نمایش نقاط کور وسایل نقلیه، اخطار برخورد، رادار، دوربین، تشخیص فاصله و سنسورهای اولتراسونیک که همه با هم کار میکنند تا هدایت خودران را برای اتومبیلها فراهم سازند.
اینترنت اشیا یا IOT
خودروهای خودران برای دریافت دادههای ترافیکی، وضعیت آب و هوا، نقشهها، آگاهی از تصادفها و سایر شرایط از رایانش ابری استفاده میکنند. این اطلاعات به آنها کمک میکند تا نظارت بهتری روی محیط اطرافشان داشته باشند و تصمیمهای مناسبتری اتخاذ کنند. خودروهای خودران باید به اینترنت متصل باشند حتی با وجود اینکه سختافزارهای محاسباتی موجود روی آنها بسیاری از وظایف محاسباتی کوچک را انجام میدهند.
نرم افزار ها و الگوریتمهای کنترل کننده
همهی اطلاعاتی که توسط سنسورها جمعآوری میشوند نیازمند آنالیزهای دقیق کامپیوتری هستند تا بر اساس آن عکسالعملی که ماشین از خودش نشان میدهد به بهترین شکل انتخاب شود و این وظیفهی اصلی الگوریتمهای کنترل و نرمافزارهاست. این بخش پیچیدهترین بخش خودروهای خودران است چراکه تصمیماتی که این الگوریتمها میگیرند باید بیعیب و نقص باشند و هر گونه اشتباه در این بخش، میتواند منجر به تصادفات مرگبار شود.
تکنولوژی خودروهای خودران حامیان و منتقدان زیادی دارد. مایک دملر، آنالیزور سنسور از گروه لینلی، معتقد است که داشتن این خودروها تا زمانی خوب است که شما نمیخواهید از شهر خارج شوید یا به خرید، سفر و طبیعت بروید و تا قبل از فراگیر شدن این تکنولوژی، خودروهای خودران باید در کنار ماشینهای معمولی در خیابانها تردد کنند که این مسئله بسیار پیچیده خواهد شد. کریس جیکوبز، رئیس کل سیستم مستقل حمل و نقل کمپانی آنالوگ دیوایس گفته است که این خودروها مثل انسانها رانندگی نخواهند کرد بلکه بسیار بهتر این کار را انجام خواهند داد اما برای گسترش این تکنولوژی به چیزی بیشتر از نرمافزارها و سختافزارهای پیشرفته نیاز است و آن هم پذیرش این تکنولوژی توسط مردم است.
ماشینهای بسیاری امروزه نیمه اتوماتیک هستند و برخی از آنها قابلیت پارک کردن اتوماتیک دارند. کمپانی تسلا مشغول فروختن راهحل اتوماتیکسازی خودروهاست و شرکت گوگل برنامهی راهاندازی خط تولید خودروهای خودران خود را دارد.
گردآورنده:مهرداد شفیعی